The Virtual Testing System, developed by OBRUM, serves a crucial role in advancing the development of autonomous land vehicle systems.
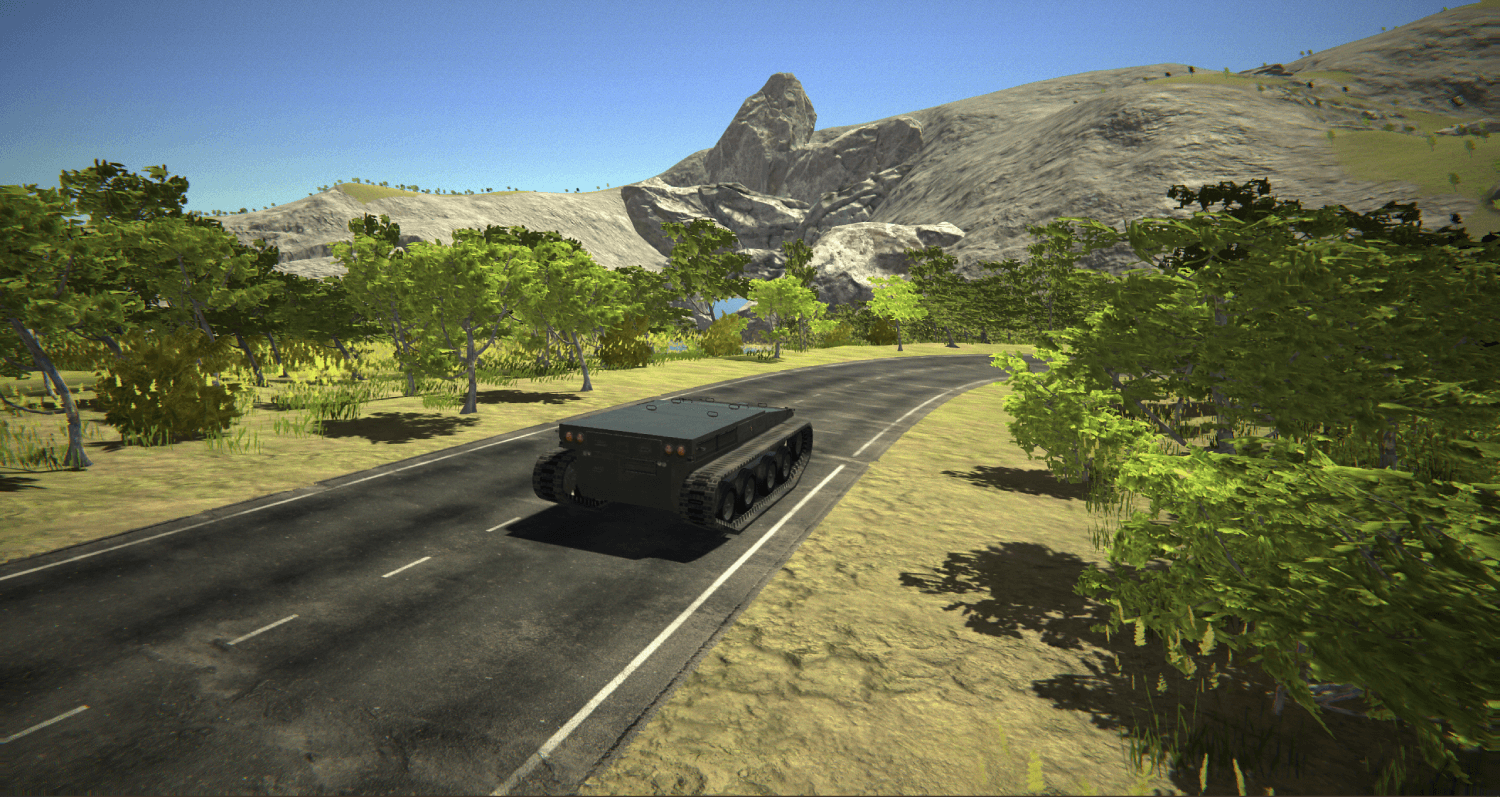
During the initial design phase of such vehicles, our team encountered several challenges, including difficult accessibility of test platforms. It had a negative impact on the cost associated with modifying vehicles for preliminary system investigations. The issues were also associated with the availability of training and test data for AI algorithms. To overcome these issues, OBRUM conceived a solution that provides a comprehensive simulation environment for any terrestrial platform, equipped with both passive and active sensors, as well as various actuators and manipulators.
Prior to commencing any tests related to the autonomous operation of actual platforms, the OBRUM team conducts rigorous and extensive evaluation using the Virtual Testing System. This solution allows for the verification of software components at all levels of the system abstraction. Apart from testing the data acquisition and preprocessing modules, also more complex functionalities, such as vehicle localization in 3D space, path planning, object classification, and environmental orientation are subject to test procedures.
Key Functionalities of the VTS Include:
VTS may serve as a training platform for future operators of robotic systems including unmanned ground vehicles. Through the seamless integration of the simulator, especially with OBRUM’s autonomous systems, prospective users gain a thorough understanding of unmanned vehicle control principles. They may also effectively learn the way to utilize control applications.
OBRUM’s VTS is a state-of-the-art solution that not only enhances the development of autonomous systems, but in addition ensures the proper and safe operation of UGV’s.

![]()
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}