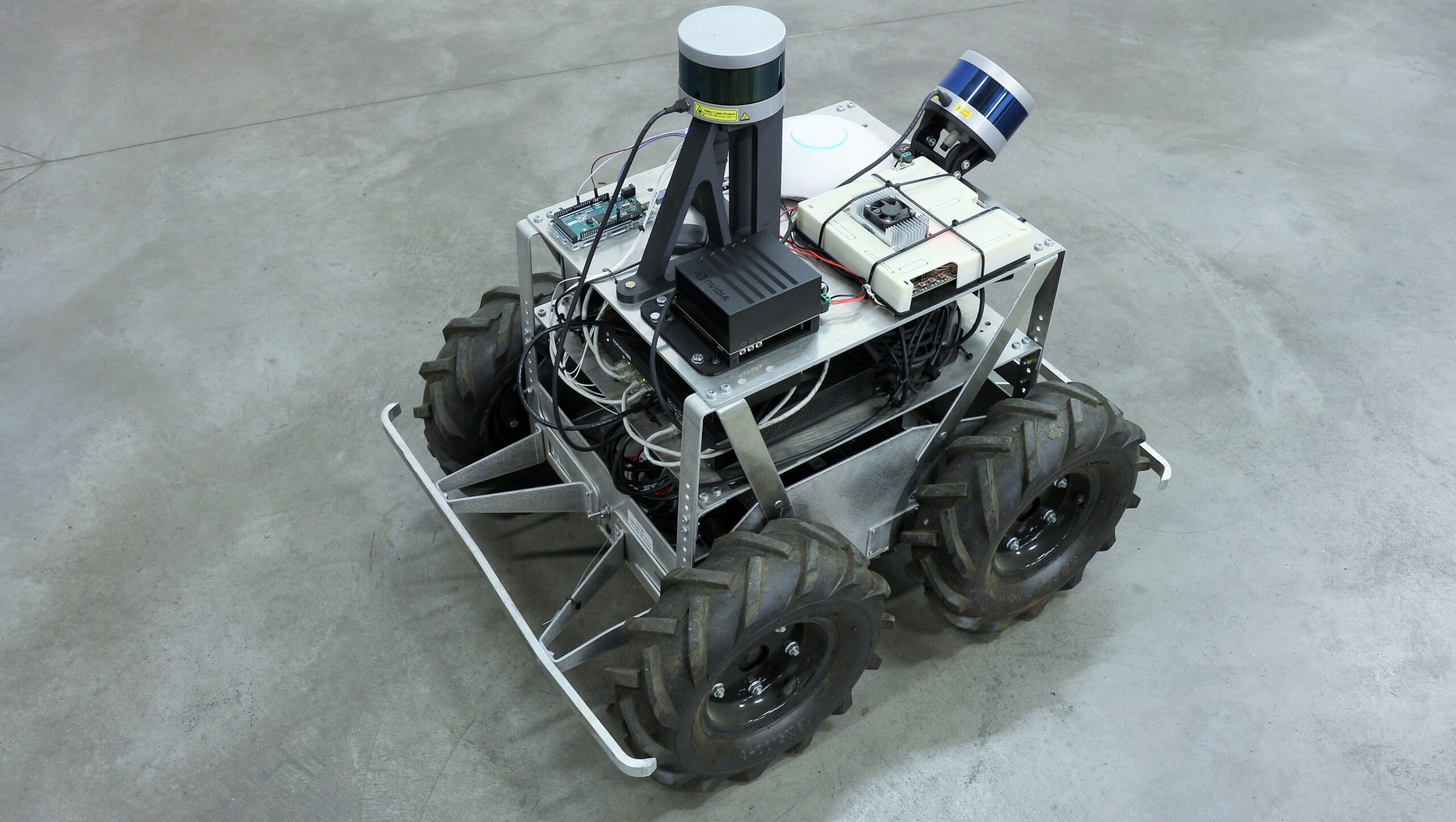
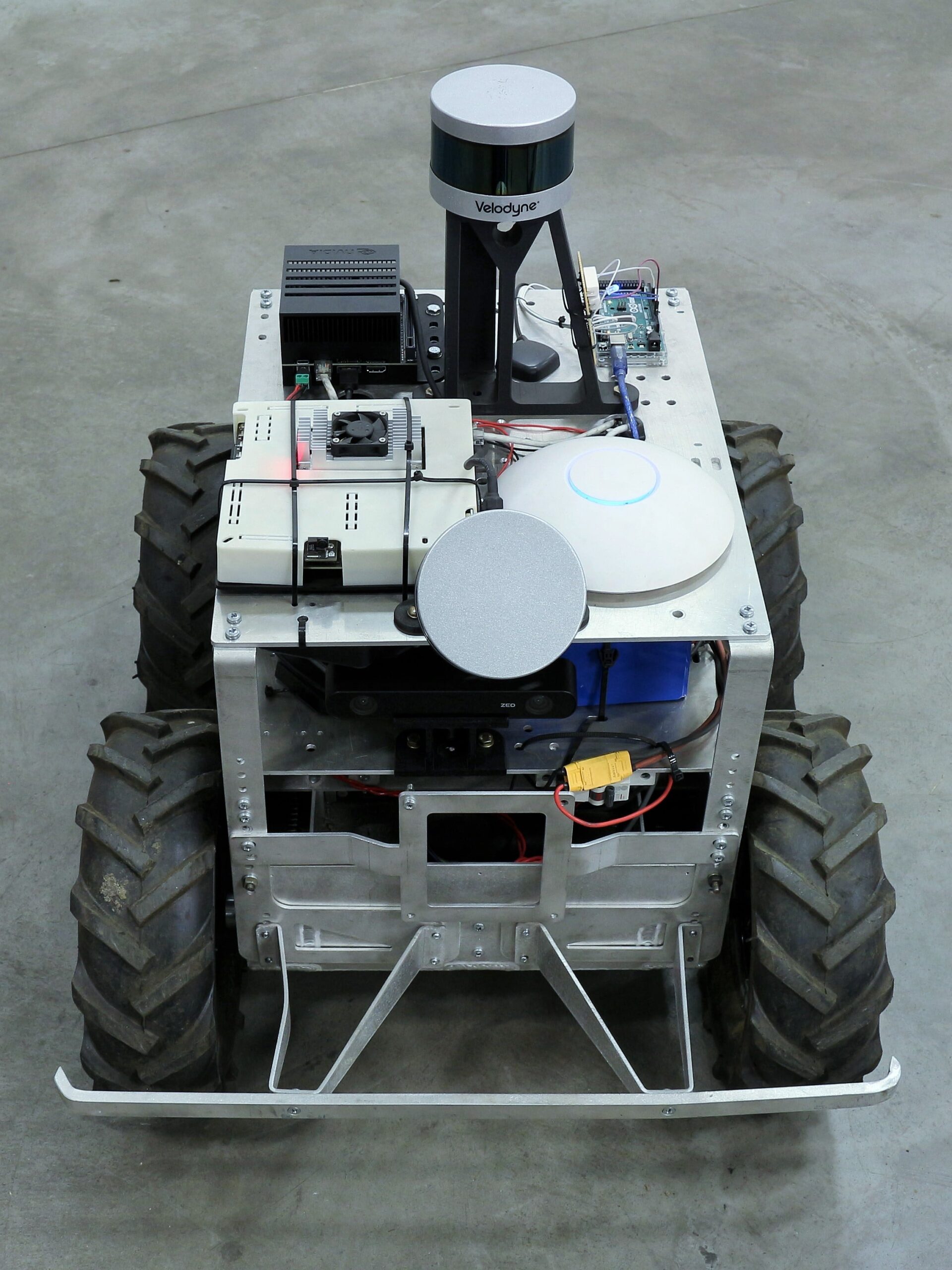
The modular system for control of unmanned vehicles traffic, developed by the Simulator Office of OBRUM, is a composition of modern modules of artificial intelligence and uses input information received from typical detectors that are commonly installed on unmanned vehicles. The system advantage is a modular structure, which means that it can work properly with various types of sensors arranged in customized configurations, not only expensive 3D laser scanners (LiDAR). The newly designed technology enables modelling of decision processes for unmanned vehicles by means of editable behavioural trees. It means that users (operators of the technology) become a designer of the vehicle behaviour and, in contrary to solutions of the end-to-end type, where user have no impact onto decision taken by an artificial intelligence, the vehicle behaviour is predictable and safe. Implementation of behavioural trees into the decision-making system enables further extension of the system by incorporation of additional sensors and implementation of more advanced solutions from the areas of artificial intelligence and data analysis. In addition, it allows taking collective decisions, i.e. decisions on grounds of information from numerous modules and sensor asked to resolve the same problem.
The control system is based on advanced software solutions in the following fields:
• optic flow and simultaneous localization and mapping (SLAM),
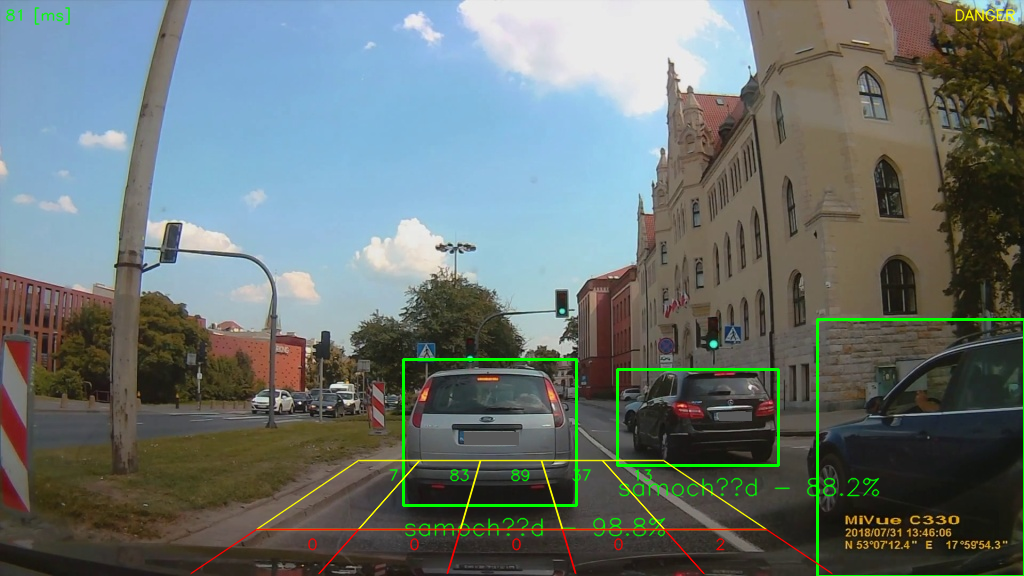
• detection, tracking and identification of objects,
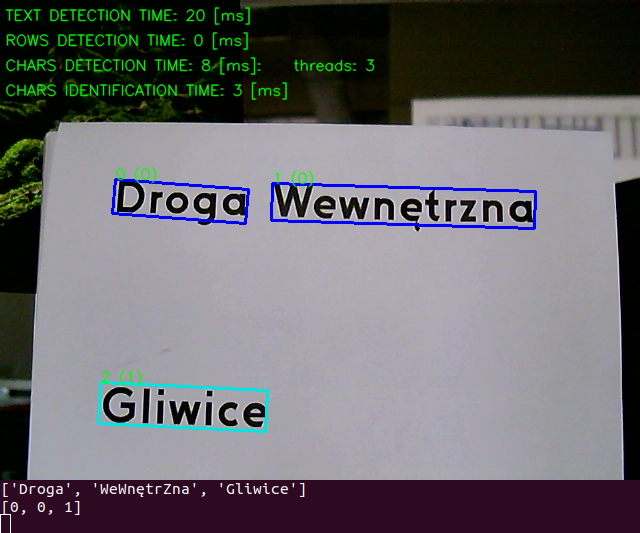
• semantic segmentation of images,
• deep neural networks,
• behavioural trees,
• GPS navigation,
• conversational interfaces,
• test and imitating environments

![]()
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}